
Miejsce pochodzenia:
Chiny
Nazwa handlowa:
Hwashi
Orzecznictwo:
CE
Skontaktuj się z nami
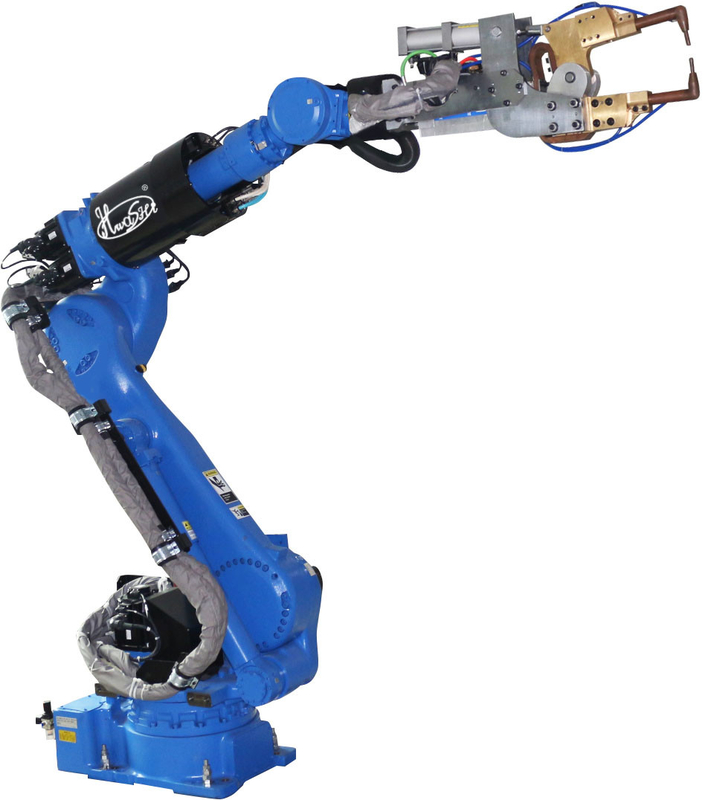

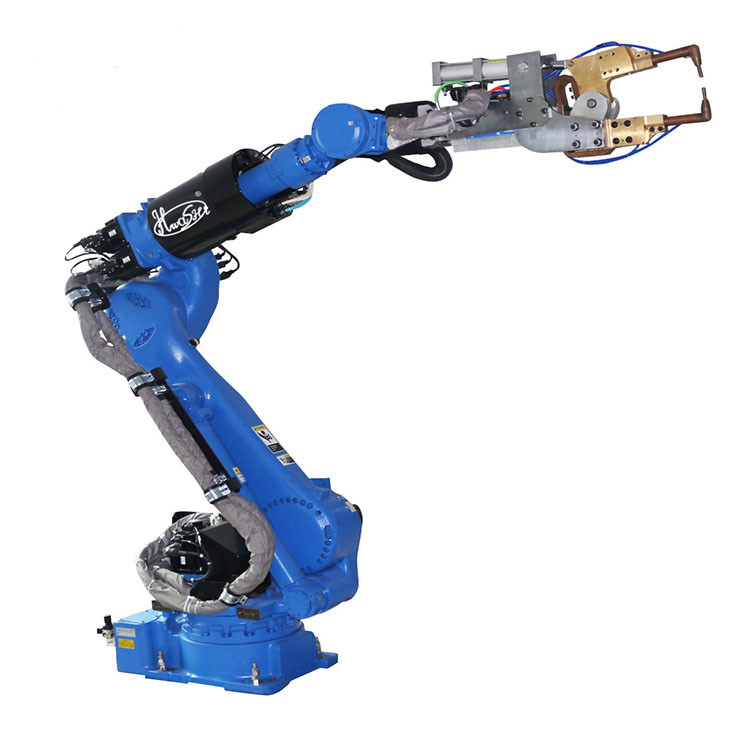
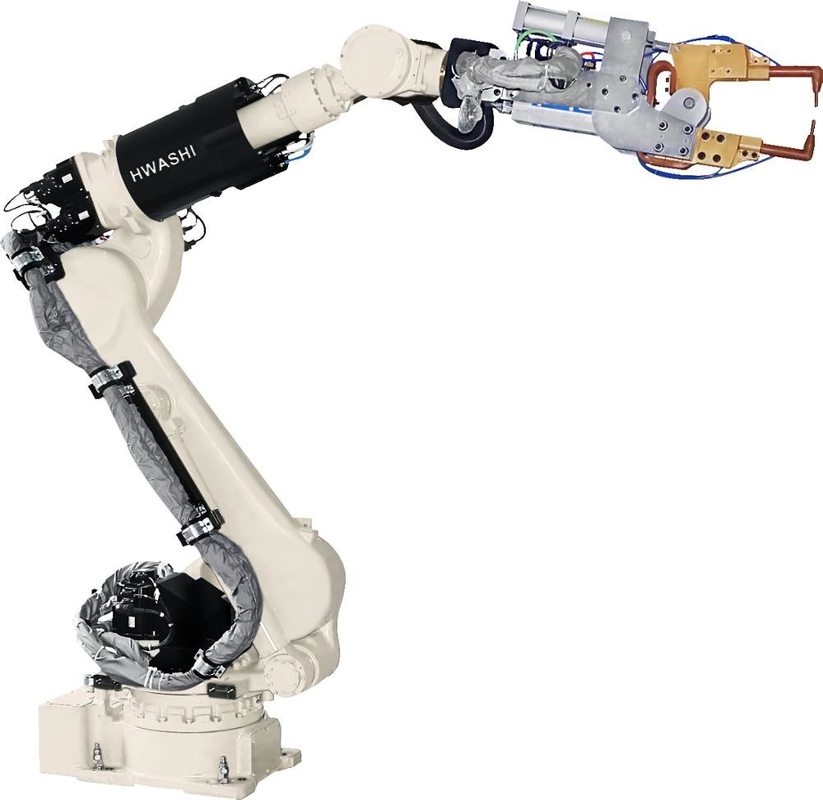
Robot do zgrzewania punktowego składa się z sześcioosiowego korpusu robota 165 kg, komputerowego systemu sterowania, skrzynki dydaktycznej i systemu zgrzewania punktowego. Robot do zgrzewania punktowego może zastąpić spawanie ręczne przez człowieka. Zmniejszyć intensywność pracy spawacza, ale może również zapewnić jakość spawania i poprawić wydajność spawania.Popularne
w przemyśle motoryzacyjnym, maszynowym, energetyce kolejowej, sprzęcie IC, wojskowym i innych branżach


Specyfikacje dla 5 modeli ramion robota:
| Model | HS-R6-08 | HS-R6-10 | HS-R6-20 | HS-R6-50 | HS-R6-165 | |
| DOF | 6 | |||||
| Tryb jazdy | Napęd AC Servo | |||||
| Obciążenie efektywne | 8 kg | 10 kg | 20 kg | 50 kg | 165 kg | |
| Powtarzaj dokładność | ± 0,05 mm | |||||
| Promień pracy | 1400mm | 1589mm | 1595mm | 1950mm | 2483mm | |
| Waga | 180 kg | 180 kg | 290 kg | 600 kg | 1300 kg | |
| Zakres ruchu (°) | J1 | ±170 | ±170 | ±170 | ±180 | ±180 |
| J2 | ±120~-85 | ±120~-80 | ±132~-95 | ±130~-90 | ±80~-60 | |
| J3 | ±85~-165 | ±85~-165 | ±73~-163 | ±75~-210 | ±80~-190 | |
| J4 | ±180 | ±180 | ±180 | ±360 | ±360 | |
| J5 | ±135 | ±135 | ±133 | ±115 | ±115 | |
| J6 | ±360 | ±360 | ±360 | ±360 | ±360 | |
| Maksymalna prędkość(°/s) | J1 | 130 | 130 | 147 | 158 | 100 |
| J2 | 130 | 130 | 100 | 149 | 90 | |
| J3 | 130 | 130 | 135 | 130 | 104 | |
| J4 | 270 | 270 | 300 | 215 | 144 | |
| J5 | 170 | 170 | 198 | 251 | 160 | |
| J6 | 455 | 455 | 194 | 365 | 215 | |
| Moc | 4KVA | 4KVA | 6KVA | 14KVA | 31KVA | |
| Napięcie | 380V lub 220V | |||||
| Częstotliwość | 50Hz lub 60Hz | |||||
Opisy robotów spawalniczych.
1. Zgodnie z życzeniem spawanych produktów projektujemy robota przy użyciu sześcioosiowej ramy wyposażonej w spawarki tig/mig, aby automatycznie zakończyć spawanie.
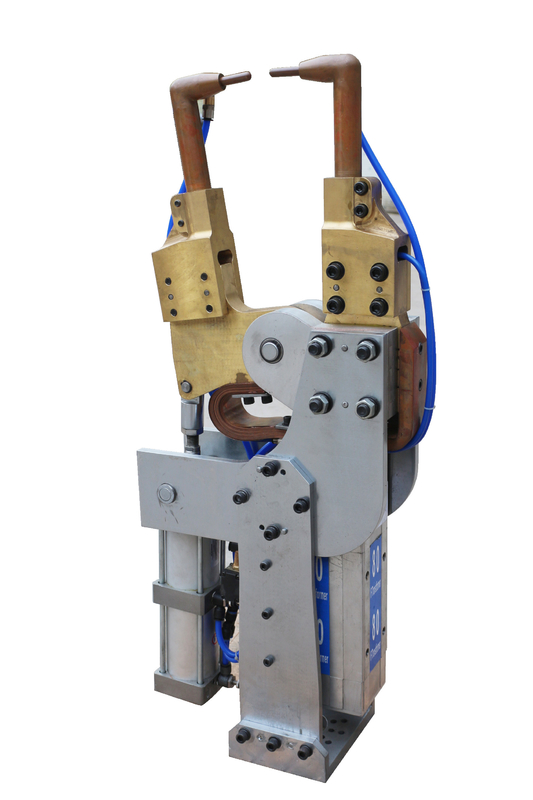
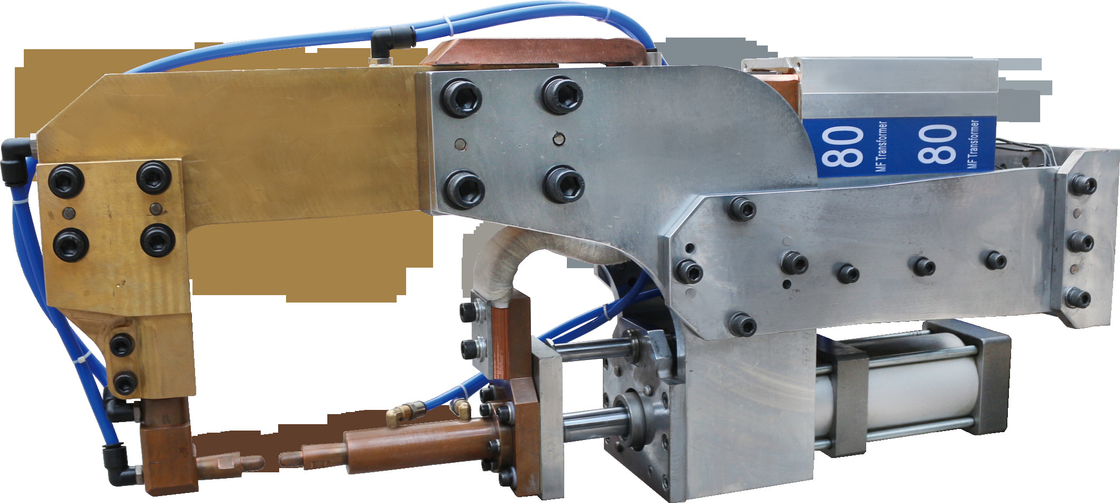
2. Robot spawalniczy wykorzystuje cylinder lub zacisk i wykorzystuje zasadę dźwigni do mocowania produktu.W ten sposób można spełnić wymagania dotyczące automatycznego spawania i upewnić się, że robot może spawać każdą część produktu.
3. Zgodnie z wymaganiami dotyczącymi wydajności produkcji projektujemy dwa zestawy opraw.Jedna służy do załadunku obrabianych elementów, druga służy do spawania.Poprawa jakości spawania i wydajności spawania.
Stanowisko i osprzęt robota spawalniczego można zaprojektować zgodnie z Twoimi produktami,
Przejrzyste zdalne programowanie ramienia robota.
Kompletny robot spawalniczy zawiera ramię robota, urządzenie do zmiany pozycji, skrzynkę sterownika, pilot do programowania, kable itp.
Wyślij zapytanie bezpośrednio do nas


