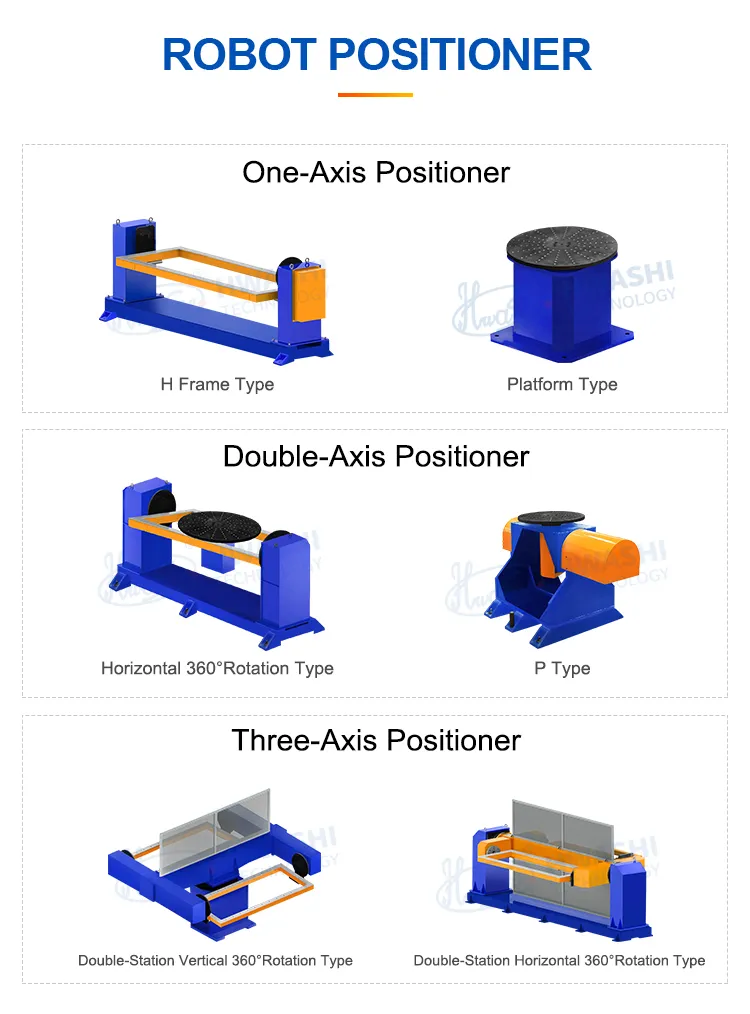
1. Kompletny system robota spawalniczego obejmuje jeden zestaw robota HS-R6-08 o długości ramienia 1,4 m, 1 zestaw spawarki TIG 400A, 1 zestaw automatycznego pistoletu spawalniczego zapobiegającego kolizjom, 2 zestawy jednoosiowego pozycjonera obrotowego w pionie oraz 2 zestawy regulowanych uchwytów spawalniczych itp. 2. Automatyczne spawanie jest przeprowadzane przez 6-osiową spawarkę MIG z robotem. Cylindry lub szybkie zaciski służą do ustalenia pozycji produktu za pomocą zasady dźwigni, aby zapewnić wymagania pozycjonowania automatycznego spawania robota, aby zapewnić możliwość spawania każdej części produktu. Zgodnie z wymaganiami wydajności produkcji, zaprojektowano dwa zestawy pozycjonerów, jeden do załadunku i rozładunku przedmiotu obrabianego, a drugi do spawania.
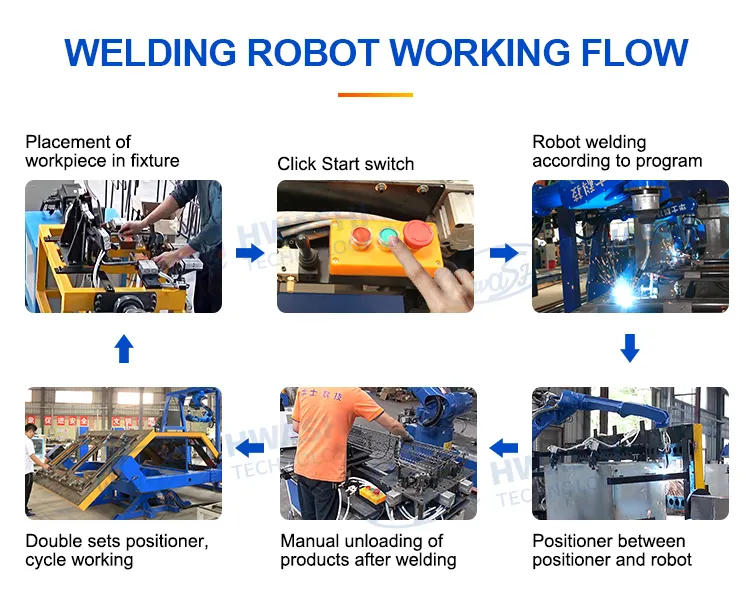
Przebieg pracy
1) Ręczny załadunek przedmiotu obrabianego do uchwytu w stacji 1 na stałym stole;
2) Rozpoczęcie spawania;
3) Robot i spawarka wykonają spawanie na przedmiocie obrabianym zgodnie z zaprogramowanym programem;
4) Spawanie zakończone;
5) Podczas gdy stacja 1 jest spawana, stacja 2 jest ładowana i mocowana jednocześnie przedmiot obrabiany. Dwie stacje pracują naprzemiennie.
6) Cykl pracy
7) Ta maszyna może osiągnąć automatyczne spawanie z ręcznym załadunkiem materiału. Może również poprawić jakość spawania i wydajność spawania. Co więcej, może obniżyć koszty produkcji. Rozwiązano problem niestabilnej jakości i niskiej wydajności produkcji spowodowany czysto ręczną obsługą.
Lista maszyn
1. Pozycjoner, ręczny załadunek;
2. Cylinder do mocowania produktu;
3. Cylinder do obracania uchwytu;
4. Automatyczne spawanie robota;
5. Ręczny rozładunek produktu;
6. Urządzenie do czyszczenia pistoletu spawalniczego
Lista maszyn
1. Pozycjoner, ręczny załadunek;
2. Cylinder do mocowania produktu;
3. Cylinder do obracania uchwytu;
4. Automatyczne spawanie robota;
5. Ręczny rozładunek produktu;
6. Urządzenie do czyszczenia pistoletu spawalniczego